Cycle Slips Mitigation through a State-Based Filtering Method of Unwrapping GNSS-RO Phase Measurements
Yang
Wang
University of Colorado Boulder
Poster
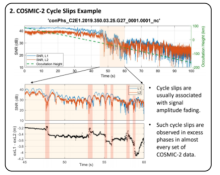
Global Navigation Satellite Systems Radio Occultation (GNSS-RO) systems, such as COSMIC, COSMIC II, LEMUR-2 (Spire Global Inc.), and CICERO (GeoOptics Inc.), record high-rate (50-100 Hz) dual-frequency carrier phase and signal-to-noise (SNR) measurements of GNSS-RO signals with tangent heights lower than ~150 km, using open-loop (OL) tracking or closed-loop (CL) & OL tracking in a transition mode. These phase measurements are used to estimate the atmospheric excess phase and the ionospheric total electron content (TEC) along the signal path, which are further processed to retrieve the profiles of bending angles, refractivity, temperature, pressure, and water vapor in the atmosphere and the profiles of electron density in the ionosphere, respectively. Unwrapping these phase measurements may introduce cycle slips, which are phase discontinuities at integer numbers of cycles. Cycle slips are likely to occur when signals travel through the lower troposphere and ionosphere irregularities and experience scintillation effects (i.e., rapid signal amplitude and phase fluctuations), and their occurrence is usually associated with signal amplitude fading. Cycle slips are considered as one of the major error sources of GNSS-RO retrievals.
In this presentation, we will introduce a state-based filtering method of unwrapping GNSS-RO phase measurements from OL tracking. This method can effectively mitigate cycle slips and simultaneously reduce noise. It can be summarized as follows: 1) the filter inputs are the raw dual-frequency phase measurements from OL tracking after removing navigation data bits and phase dynamics such as precise orbits, high-rate clock biases, climatological models, etc.; 2) the residual phase dynamics is modeled based on contributions from the ionospheric effects (dispersive) and the mis-modeled portion of the tropospheric effects (non-dispersive) with a carefully chosen noise covariance matrix; 3) the measurement model adopts an adaptive noise covariance based on high-rate SNR estimations; 4) the filtering is based on an adjusted Kalman filter where the estimation of integer-cycle biases is incorporated. More details of this method can be found in [Wang et al., 2020], where it (with some minor adjustments) was demonstrated for phase delay altimetry using coherent GNSS reflection signals. To assess its performance in GNSS-RO, we are working with real data recorded by COSMIC and LEMUR-2 and using the state-based filtering method to re-estimate the excess phase and slant TEC and update the retrieval of profiles. The processing results will be comparatively analyzed and demonstrated using reference data, e.g., radiosonde measurements, the ECMWF model, etc.
Reference:
Y. Wang, B. Breitsch and Y. T. J. Morton, "A State-Based Method to Simultaneously Reduce Cycle Slips and Noise in Coherent GNSS-R Phase Measurements From Open-Loop Tracking," in IEEE Transactions on Geoscience and Remote Sensing, doi: 10.1109/TGRS.2020.3036031.
In this presentation, we will introduce a state-based filtering method of unwrapping GNSS-RO phase measurements from OL tracking. This method can effectively mitigate cycle slips and simultaneously reduce noise. It can be summarized as follows: 1) the filter inputs are the raw dual-frequency phase measurements from OL tracking after removing navigation data bits and phase dynamics such as precise orbits, high-rate clock biases, climatological models, etc.; 2) the residual phase dynamics is modeled based on contributions from the ionospheric effects (dispersive) and the mis-modeled portion of the tropospheric effects (non-dispersive) with a carefully chosen noise covariance matrix; 3) the measurement model adopts an adaptive noise covariance based on high-rate SNR estimations; 4) the filtering is based on an adjusted Kalman filter where the estimation of integer-cycle biases is incorporated. More details of this method can be found in [Wang et al., 2020], where it (with some minor adjustments) was demonstrated for phase delay altimetry using coherent GNSS reflection signals. To assess its performance in GNSS-RO, we are working with real data recorded by COSMIC and LEMUR-2 and using the state-based filtering method to re-estimate the excess phase and slant TEC and update the retrieval of profiles. The processing results will be comparatively analyzed and demonstrated using reference data, e.g., radiosonde measurements, the ECMWF model, etc.
Reference:
Y. Wang, B. Breitsch and Y. T. J. Morton, "A State-Based Method to Simultaneously Reduce Cycle Slips and Noise in Coherent GNSS-R Phase Measurements From Open-Loop Tracking," in IEEE Transactions on Geoscience and Remote Sensing, doi: 10.1109/TGRS.2020.3036031.
Poster PDF
Meeting name
8th International Radio Occultation Working Group Meeting - IROWG-8